 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEVA: Editing for Versatile Alignment against Jailbreaks
May 14, 2026Large Language Models (LLMs) and Vision Language Models (VLMs) have demonstrated impressive capabilities but remain vulnerable to jailbreaking attacks, where adversaries exploit textual or visual triggers to bypass safety guardrails. Recent defenses typically rely on safety fine-tuning or external filters to reduce the model's likelihood of producing harmful content. While effective to some extent, these methods often incur significant computational overheads and suffer from the safety utility trade-off, degrading the model's performance on benign tasks. To address these challenges, we propose EVA (Editing for Versatile Alignment against Jailbreaks), a novel framework that pioneers the application of direct model editing for safety alignment. EVA reframes safety alignment as a precise knowledge correction task. Instead of retraining massive parameters, EVA identifies and surgically edits specific neurons responsible for the model's susceptibility to harmful instructions, while leaving the vast majority of the model unchanged. By localizing the updates, EVA effectively neutralizes harmful behaviors without compromising the model's general reasoning capabilities. Extensive experiments demonstrate that EVA outperforms baselines in mitigating jailbreaks across both LLMs and VLMs, offering a precise and efficient solution for post-deployment safety alignment.
Pyramid Self-contrastive Learning Framework for Test-time Ultrasound Image Denoising
May 12, 2026The inherent electronic and speckle noise complicates clinical interpretation of ultrasound images. Conventional denoising methods rely on explicit noise assumptions whose validity diminishes under composite noise conditions. Learning-based methods require massive labeled data and model parameters. These pre-defined and pre-trained manners entail an inevitable domain shift in complex in vivo environments, so they are limited to a specific noise type and often blur structural details. In this study, we propose a pure test-time training framework for one-shot ultrasound image denoising and apply it to synthetic aperture ultrasound (SAU), which synthesizes transmit focus from sub-aperture transmissions. Our Aperture-to-Aperture (A2A) framework disentangles anatomical similarity and noise randomness from shuffled sub-apertures through self-contrastive learning in pyramid latent spaces. The clean image is then decoded from the anatomy space, while discarding the noise space. A2A is trained at test time on one noisy sample of SAU signals, so it fundamentally eliminates the domain shift and pretraining costs. Simulation experiments, including electronic noise levels of 0 to 30 dB and different inclusion geometries, demonstrated an improvement of 69.3% SNR and 34.4% CNR by A2A. The in vivo results showed 84.8% SNR and 25.7% CNR gains using only two aperture data of the heart in six echocardiographic views, liver, and kidney. A2A delivers clear images/signals across diverse imaging targets and configurations, paving the way for more reliable anatomical visualization and functional assessment by ultrasound.
Toward Personalized LLM-Powered Agents: Foundations, Evaluation, and Future Directions
Feb 26, 2026Large language models have enabled agents that reason, plan, and interact with tools and environments to accomplish complex tasks. As these agents operate over extended interaction horizons, their effectiveness increasingly depends on adapting behavior to individual users and maintaining continuity across time, giving rise to personalized LLM-powered agents. In such long-term, user-dependent settings, personalization permeates the entire decision pipeline rather than remaining confined to surface-level generation. This survey provides a capability-oriented review of personalized LLM-powered agents. We organize the literature around four interdependent components: profile modeling, memory, planning, and action execution. Using this taxonomy, we synthesize representative methods and analyze how user signals are represented, propagated, and utilized, highlighting cross-component interactions and recurring design trade-offs. We further examine evaluation metrics and benchmarks tailored to personalized agents, summarize application scenarios spanning general assistance to specialized domains, and outline future directions for research and deployment. By offering a structured framework for understanding and designing personalized LLM-powered agents, this survey charts a roadmap toward more user-aligned, adaptive, robust, and deployable agentic systems, accelerating progress from prototype personalization to scalable real-world assistants.
LongCat-Flash-Thinking-2601 Technical Report
Jan 23, 2026We introduce LongCat-Flash-Thinking-2601, a 560-billion-parameter open-source Mixture-of-Experts (MoE) reasoning model with superior agentic reasoning capability. LongCat-Flash-Thinking-2601 achieves state-of-the-art performance among open-source models on a wide range of agentic benchmarks, including agentic search, agentic tool use, and tool-integrated reasoning. Beyond benchmark performance, the model demonstrates strong generalization to complex tool interactions and robust behavior under noisy real-world environments. Its advanced capability stems from a unified training framework that combines domain-parallel expert training with subsequent fusion, together with an end-to-end co-design of data construction, environments, algorithms, and infrastructure spanning from pre-training to post-training. In particular, the model's strong generalization capability in complex tool-use are driven by our in-depth exploration of environment scaling and principled task construction. To optimize long-tailed, skewed generation and multi-turn agentic interactions, and to enable stable training across over 10,000 environments spanning more than 20 domains, we systematically extend our asynchronous reinforcement learning framework, DORA, for stable and efficient large-scale multi-environment training. Furthermore, recognizing that real-world tasks are inherently noisy, we conduct a systematic analysis and decomposition of real-world noise patterns, and design targeted training procedures to explicitly incorporate such imperfections into the training process, resulting in improved robustness for real-world applications. To further enhance performance on complex reasoning tasks, we introduce a Heavy Thinking mode that enables effective test-time scaling by jointly expanding reasoning depth and width through intensive parallel thinking.
EveNet: A Foundation Model for Particle Collision Data Analysis
Jan 23, 2026While deep learning is transforming data analysis in high-energy physics, computational challenges limit its potential. We address these challenges in the context of collider physics by introducing EveNet, an event-level foundation model pretrained on 500 million simulated collision events using a hybrid objective of self-supervised learning and physics-informed supervision. By leveraging a shared particle-cloud representation, EveNet outperforms state-of-the-art baselines across diverse tasks, including searches for heavy resonances and exotic Higgs decays, and demonstrates exceptional data efficiency in low-statistics regimes. Crucially, we validate the transferability of the model to experimental data by rediscovering the $Υ$ meson in CMS Open Data and show its capacity for precision physics through the robust extraction of quantum correlation observables stable against systematic uncertainties. These results indicate that EveNet can successfully encode the fundamental physical structure of particle interactions, which offers a unified and resource-efficient framework to accelerate discovery at current and future colliders.
exUMI: Extensible Robot Teaching System with Action-aware Task-agnostic Tactile Representation
Sep 18, 2025



Tactile-aware robot learning faces critical challenges in data collection and representation due to data scarcity and sparsity, and the absence of force feedback in existing systems. To address these limitations, we introduce a tactile robot learning system with both hardware and algorithm innovations. We present exUMI, an extensible data collection device that enhances the vanilla UMI with robust proprioception (via AR MoCap and rotary encoder), modular visuo-tactile sensing, and automated calibration, achieving 100% data usability. Building on an efficient collection of over 1 M tactile frames, we propose Tactile Prediction Pretraining (TPP), a representation learning framework through action-aware temporal tactile prediction, capturing contact dynamics and mitigating tactile sparsity. Real-world experiments show that TPP outperforms traditional tactile imitation learning. Our work bridges the gap between human tactile intuition and robot learning through co-designed hardware and algorithms, offering open-source resources to advance contact-rich manipulation research. Project page: https://silicx.github.io/exUMI.
Display Content, Display Methods and Evaluation Methods of the HCI in Explainable Recommender Systems: A Survey
May 14, 2025



Explainable Recommender Systems (XRS) aim to provide users with understandable reasons for the recommendations generated by these systems, representing a crucial research direction in artificial intelligence (AI). Recent research has increasingly focused on the algorithms, display, and evaluation methodologies of XRS. While current research and reviews primarily emphasize the algorithmic aspects, with fewer studies addressing the Human-Computer Interaction (HCI) layer of XRS. Additionally, existing reviews lack a unified taxonomy for XRS and there is insufficient attention given to the emerging area of short video recommendations. In this study, we synthesize existing literature and surveys on XRS, presenting a unified framework for its research and development. The main contributions are as follows: 1) We adopt a lifecycle perspective to systematically summarize the technologies and methods used in XRS, addressing challenges posed by the diversity and complexity of algorithmic models and explanation techniques. 2) For the first time, we highlight the application of multimedia, particularly video-based explanations, along with its potential, technical pathways, and challenges in XRS. 3) We provide a structured overview of evaluation methods from both qualitative and quantitative dimensions. These findings provide valuable insights for the systematic design, progress, and testing of XRS.
Building Machine Learning Challenges for Anomaly Detection in Science
Mar 03, 2025
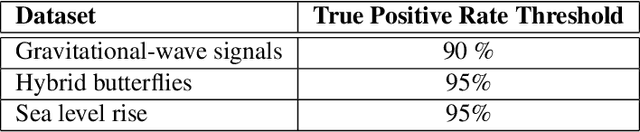


Scientific discoveries are often made by finding a pattern or object that was not predicted by the known rules of science. Oftentimes, these anomalous events or objects that do not conform to the norms are an indication that the rules of science governing the data are incomplete, and something new needs to be present to explain these unexpected outliers. The challenge of finding anomalies can be confounding since it requires codifying a complete knowledge of the known scientific behaviors and then projecting these known behaviors on the data to look for deviations. When utilizing machine learning, this presents a particular challenge since we require that the model not only understands scientific data perfectly but also recognizes when the data is inconsistent and out of the scope of its trained behavior. In this paper, we present three datasets aimed at developing machine learning-based anomaly detection for disparate scientific domains covering astrophysics, genomics, and polar science. We present the different datasets along with a scheme to make machine learning challenges around the three datasets findable, accessible, interoperable, and reusable (FAIR). Furthermore, we present an approach that generalizes to future machine learning challenges, enabling the possibility of large, more compute-intensive challenges that can ultimately lead to scientific discovery.
Auto-Search and Refinement: An Automated Framework for Gender Bias Mitigation in Large Language Models
Feb 17, 2025Pre-training large language models (LLMs) on vast text corpora enhances natural language processing capabilities but risks encoding social biases, particularly gender bias. While parameter-modification methods like fine-tuning mitigate bias, they are resource-intensive, unsuitable for closed-source models, and lack adaptability to evolving societal norms. Instruction-based approaches offer flexibility but often compromise task performance. To address these limitations, we propose $\textit{FaIRMaker}$, an automated and model-independent framework that employs an $\textbf{auto-search and refinement}$ paradigm to adaptively generate Fairwords, which act as instructions integrated into input queries to reduce gender bias and enhance response quality. Extensive experiments demonstrate that $\textit{FaIRMaker}$ automatically searches for and dynamically refines Fairwords, effectively mitigating gender bias while preserving task integrity and ensuring compatibility with both API-based and open-source LLMs.
DR.GAP: Mitigating Bias in Large Language Models using Gender-Aware Prompting with Demonstration and Reasoning
Feb 17, 2025Large Language Models (LLMs) exhibit strong natural language processing capabilities but also inherit and amplify societal biases, including gender bias, raising fairness concerns. Existing debiasing methods face significant limitations: parameter tuning requires access to model weights, prompt-based approaches often degrade model utility, and optimization-based techniques lack generalizability. To address these challenges, we propose DR.GAP (Demonstration and Reasoning for Gender-Aware Prompting), an automated and model-agnostic approach that mitigates gender bias while preserving model performance. DR.GAP selects bias-revealing examples and generates structured reasoning to guide models toward more impartial responses. Extensive experiments on coreference resolution and QA tasks across multiple LLMs (GPT-3.5, Llama3, and Llama2-Alpaca) demonstrate its effectiveness, generalization ability, and robustness. DR.GAP can generalize to vision-language models (VLMs), achieving significant bias reduction.